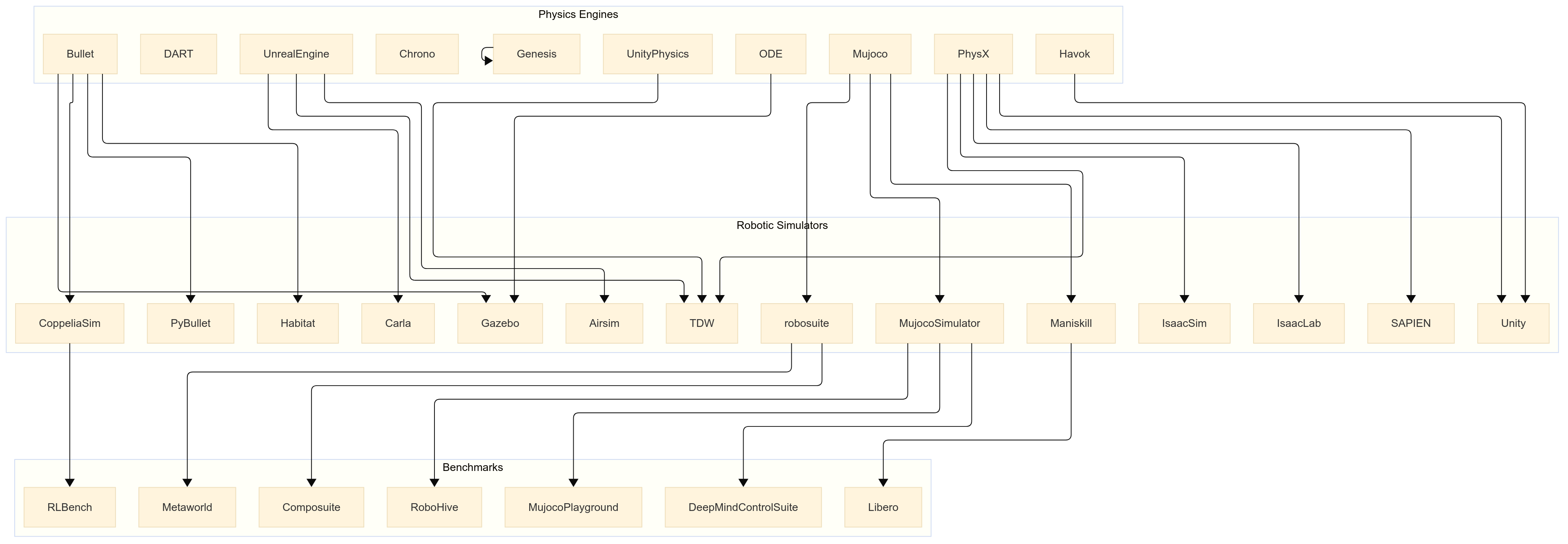
Robot learning research is rapidly advancing and relies heavily on simulation tools---physics engines,
simulation frameworks, and benchmarks---to develop and evaluate algorithms faster, safer, and more
cost-effectively than using physical hardware alone. However, the recent explosion of such tools has
created a fragmented landscape, making it difficult for researchers to navigate options or forcing them to
constantly re-implement baselines. This challenge is amplified by blurry terminology, where terms like
"simulator" are used ambiguously. To address this, our survey makes four key contributions: (1) We
introduce a formal Robot Learning Problem definition to standardize terminology and categorize existing
tools accordingly. (2) We provide a comprehensive overview of the features, strengths, and weaknesses of
current simulation tools, based on literature and hands-on evaluation. (3) We offer guidelines for tool
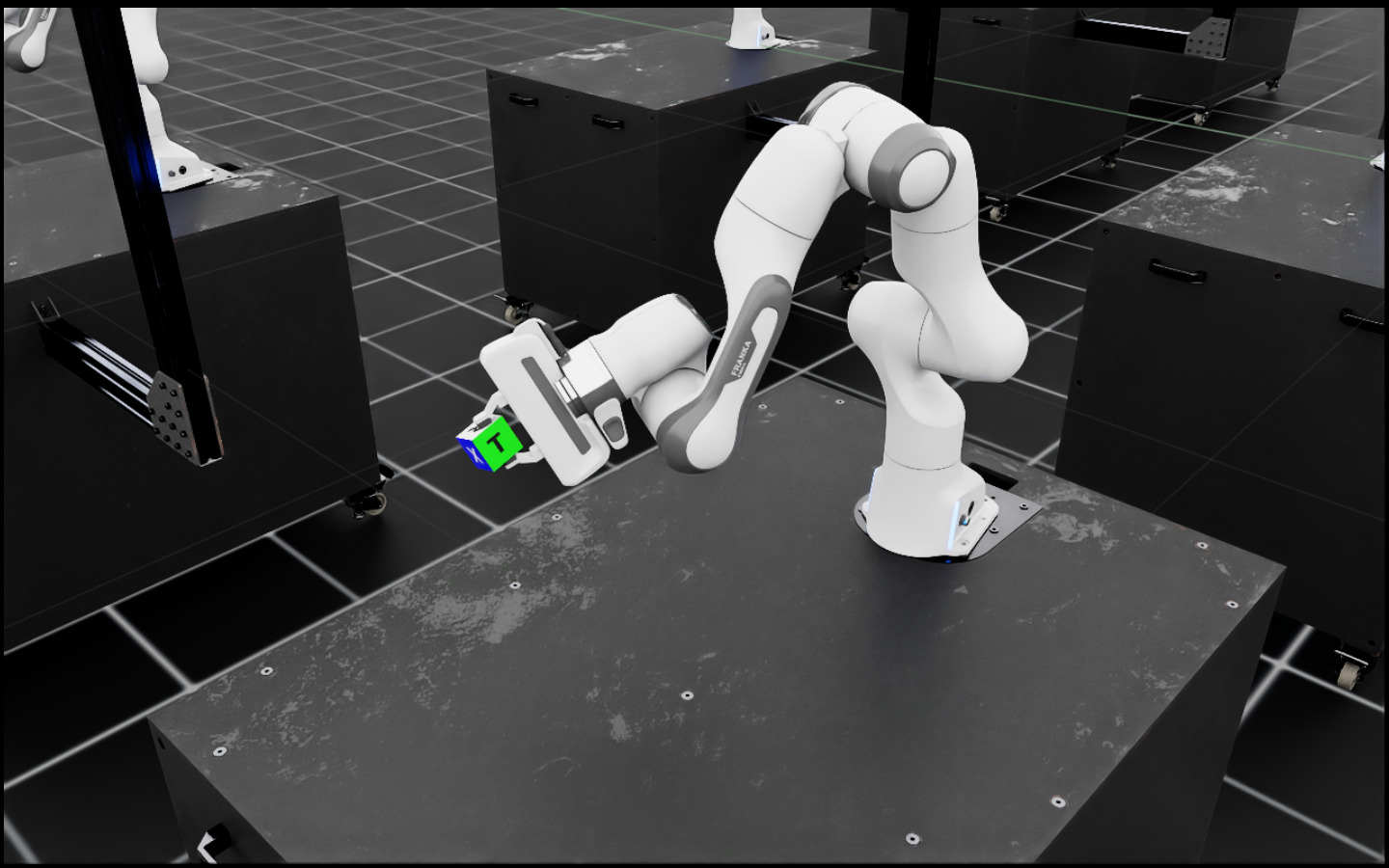
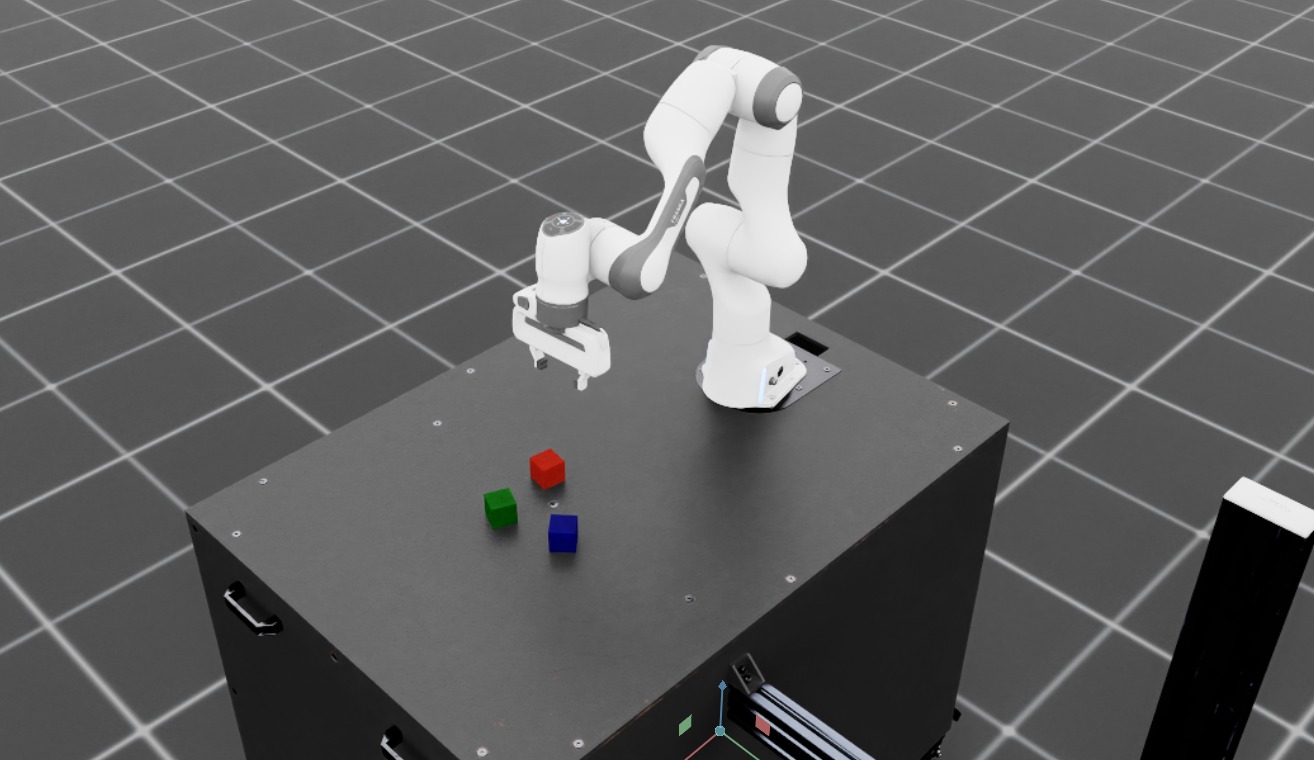
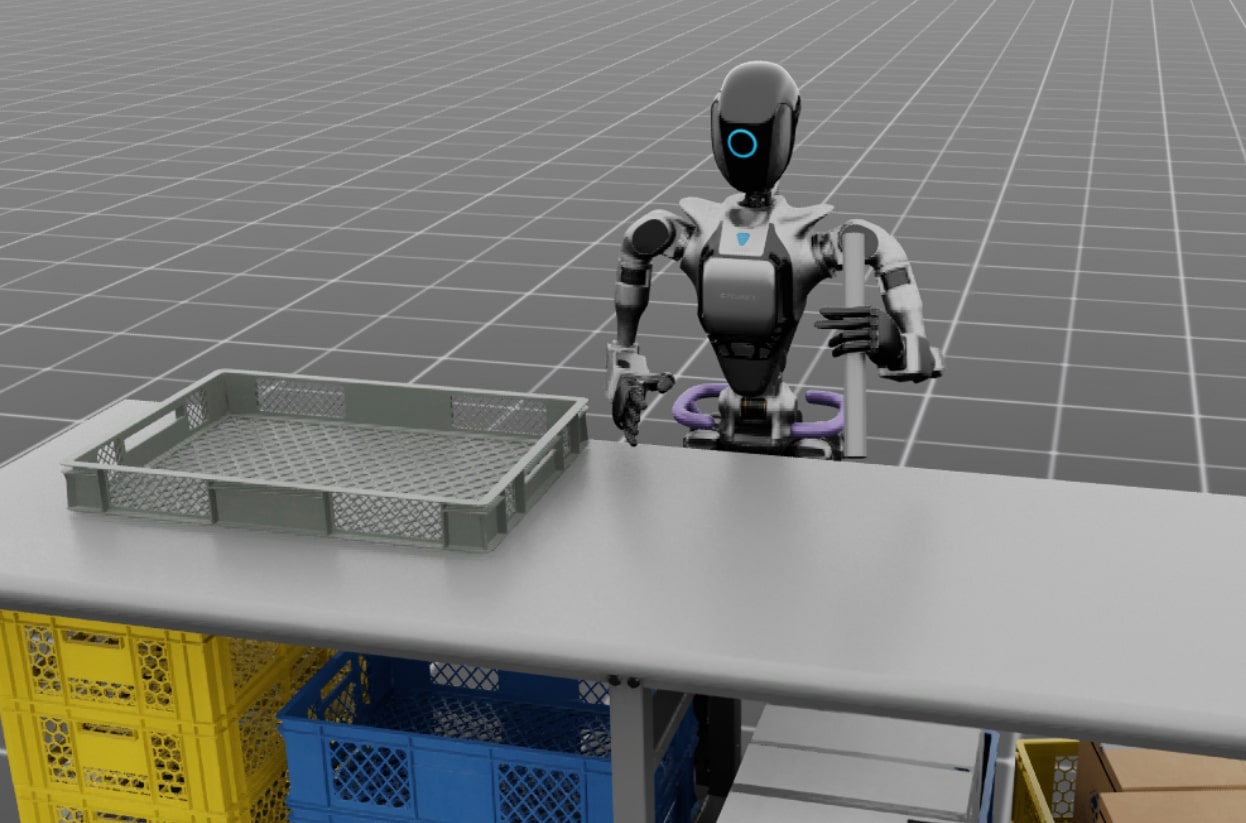
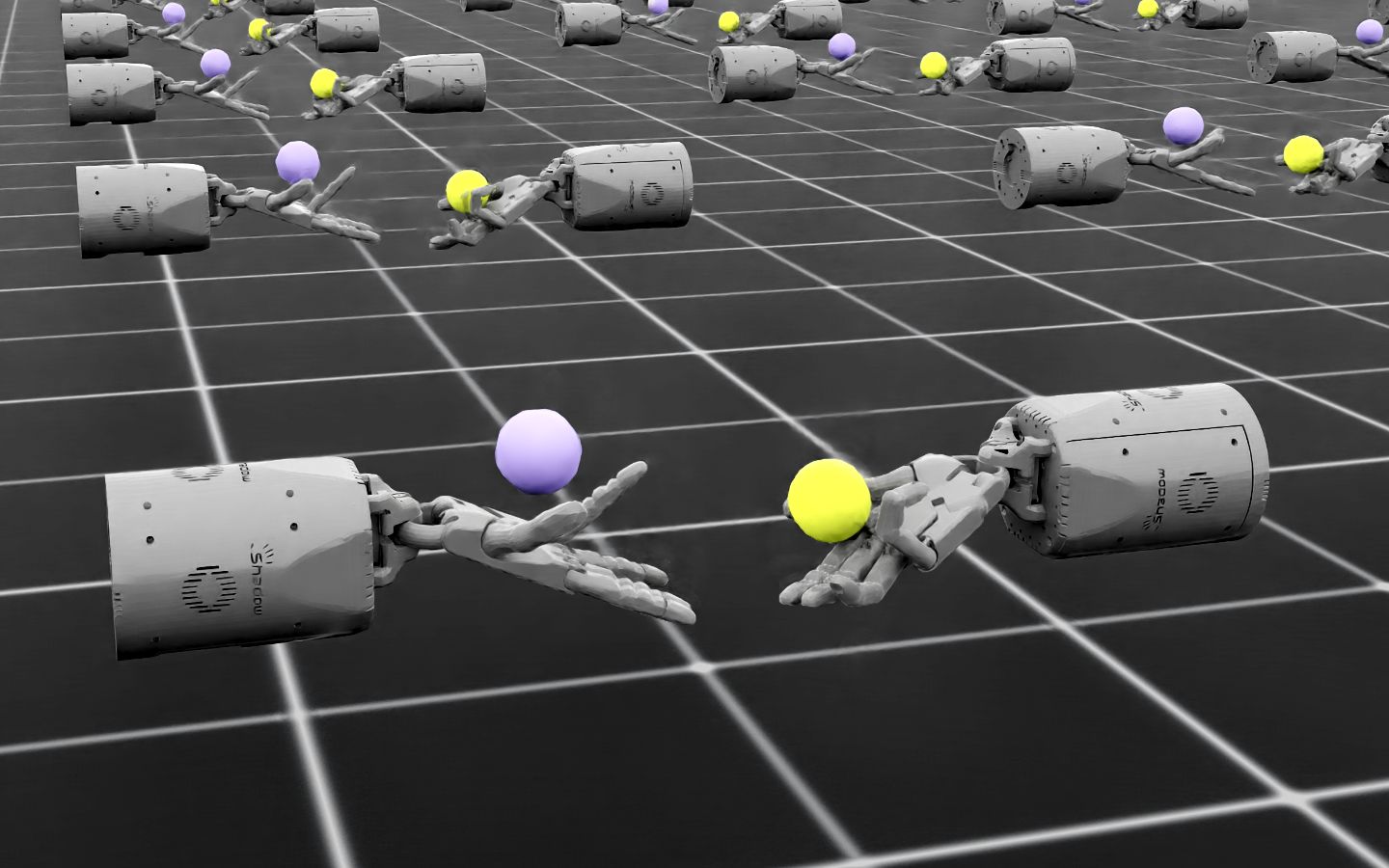
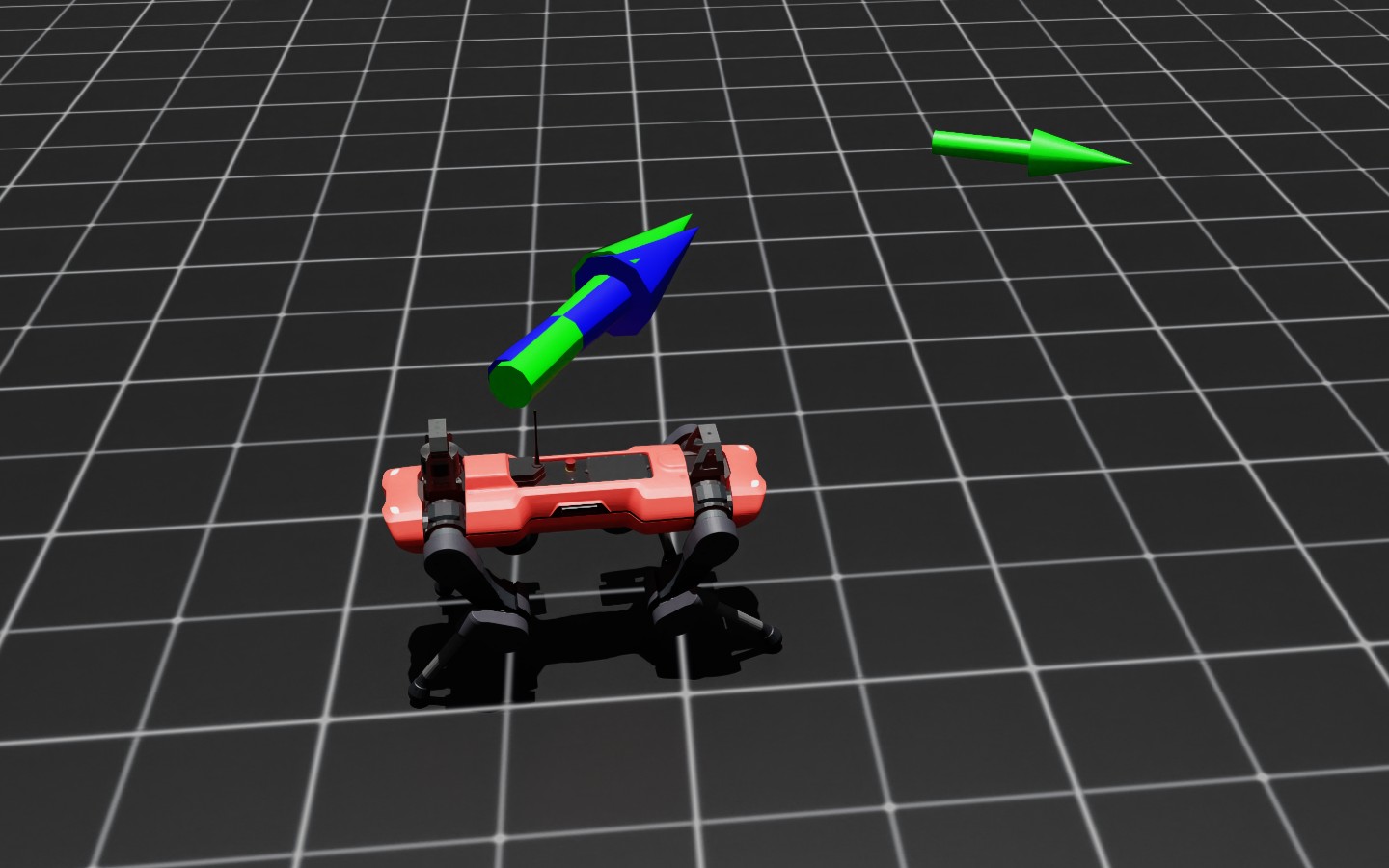
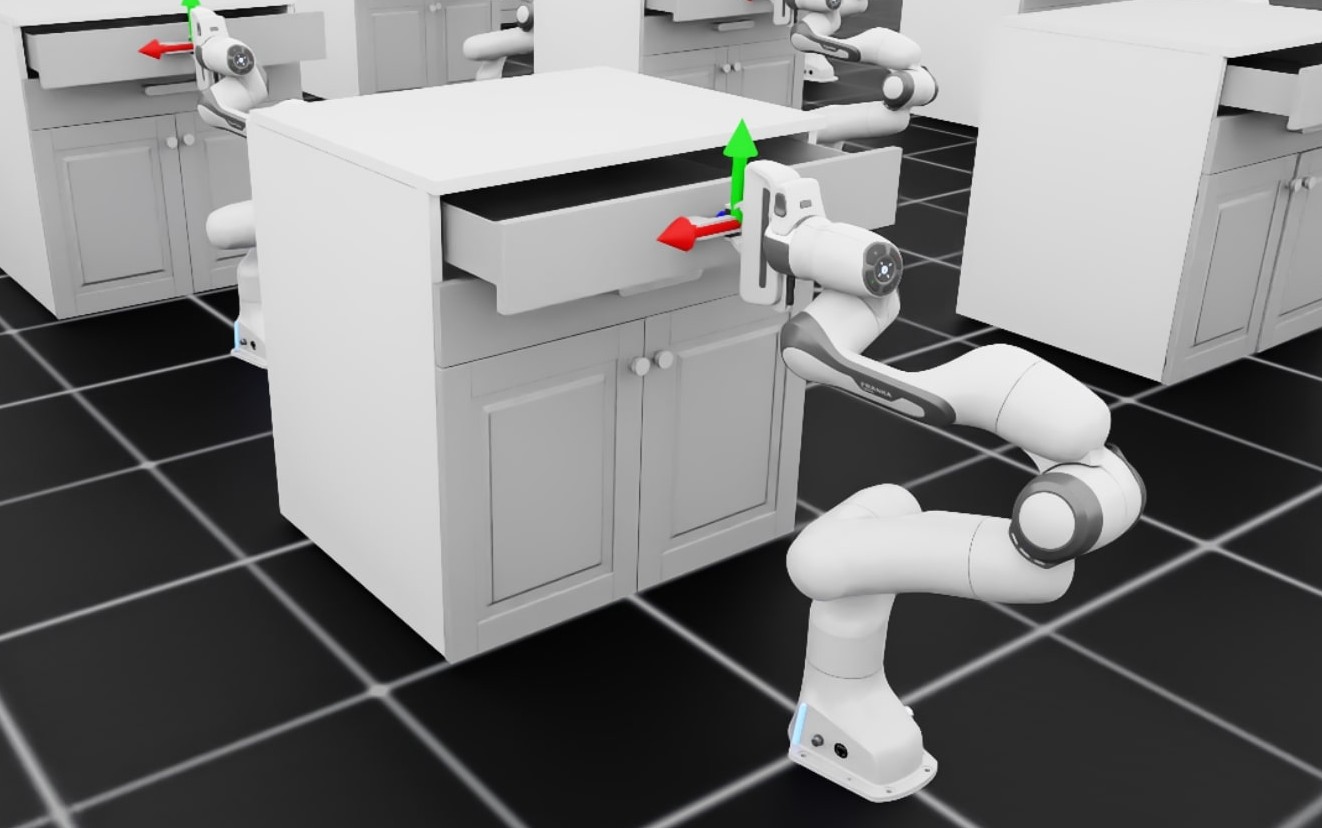
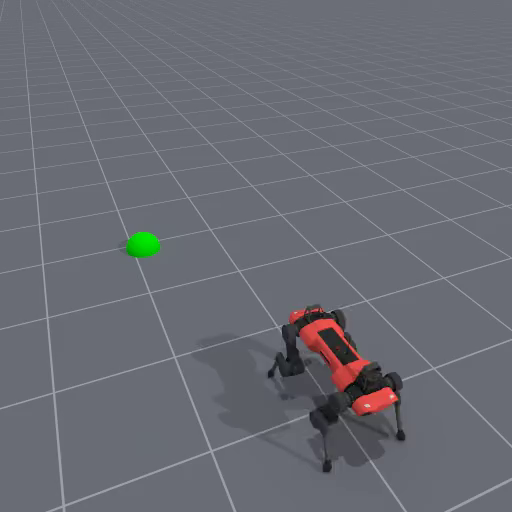
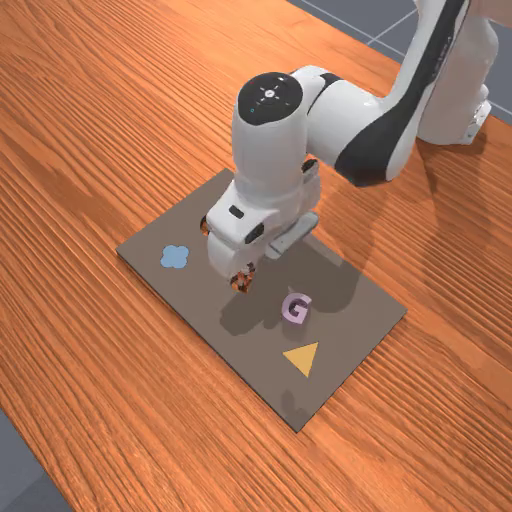
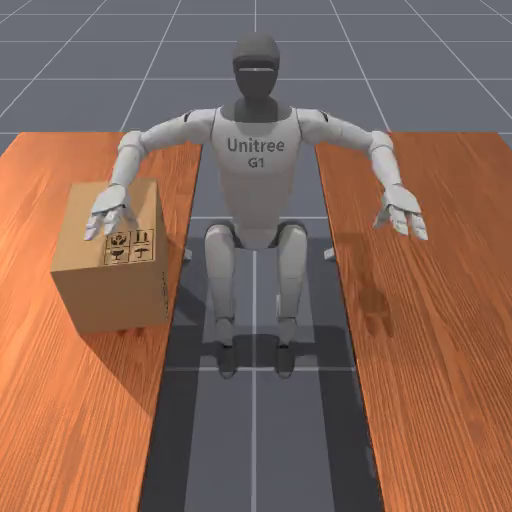
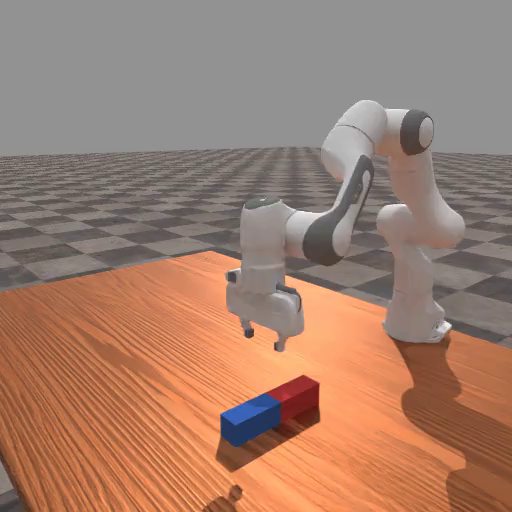
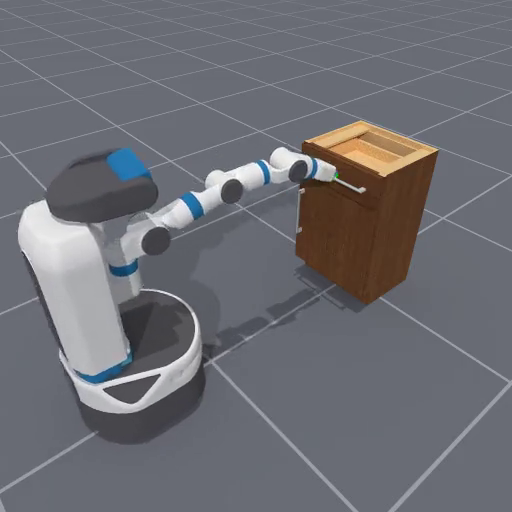
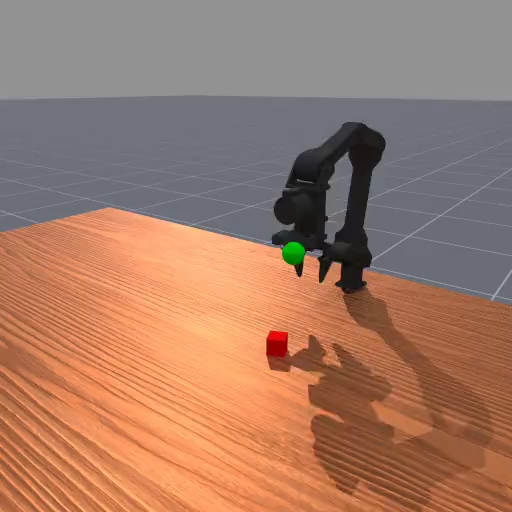
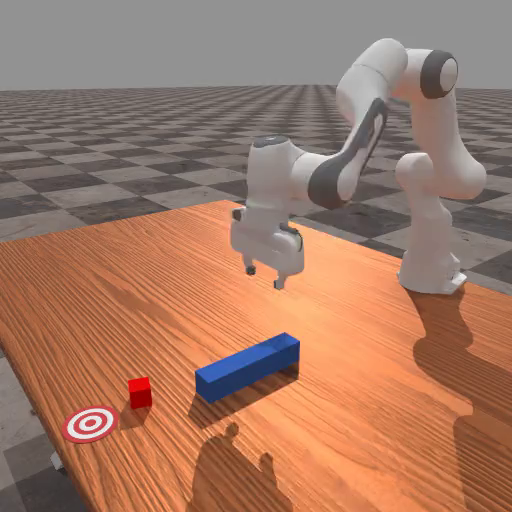
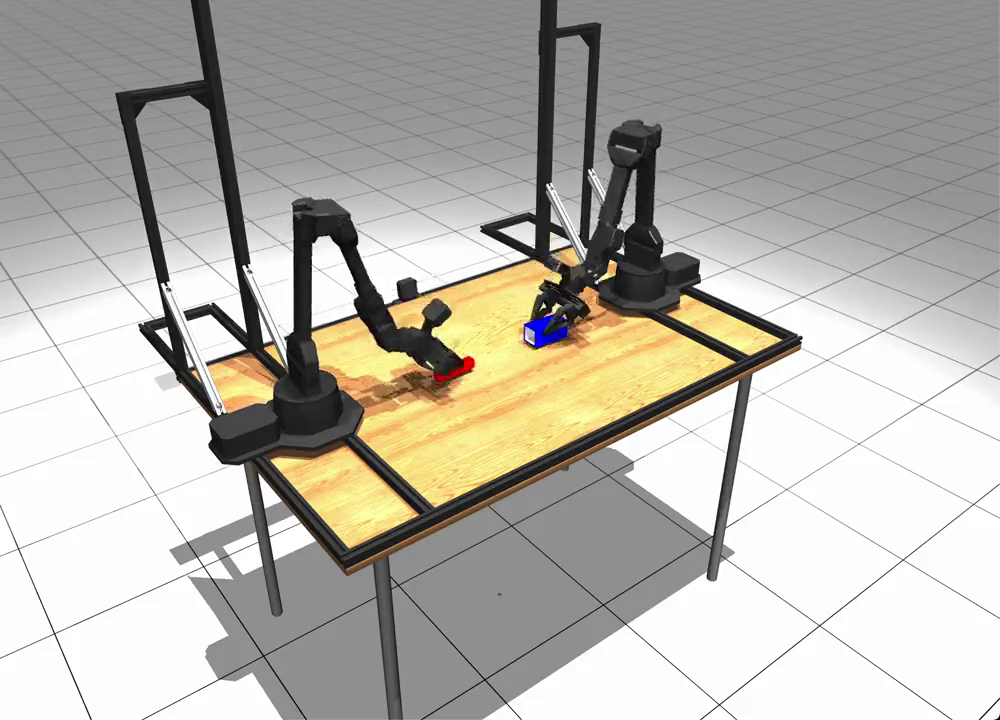
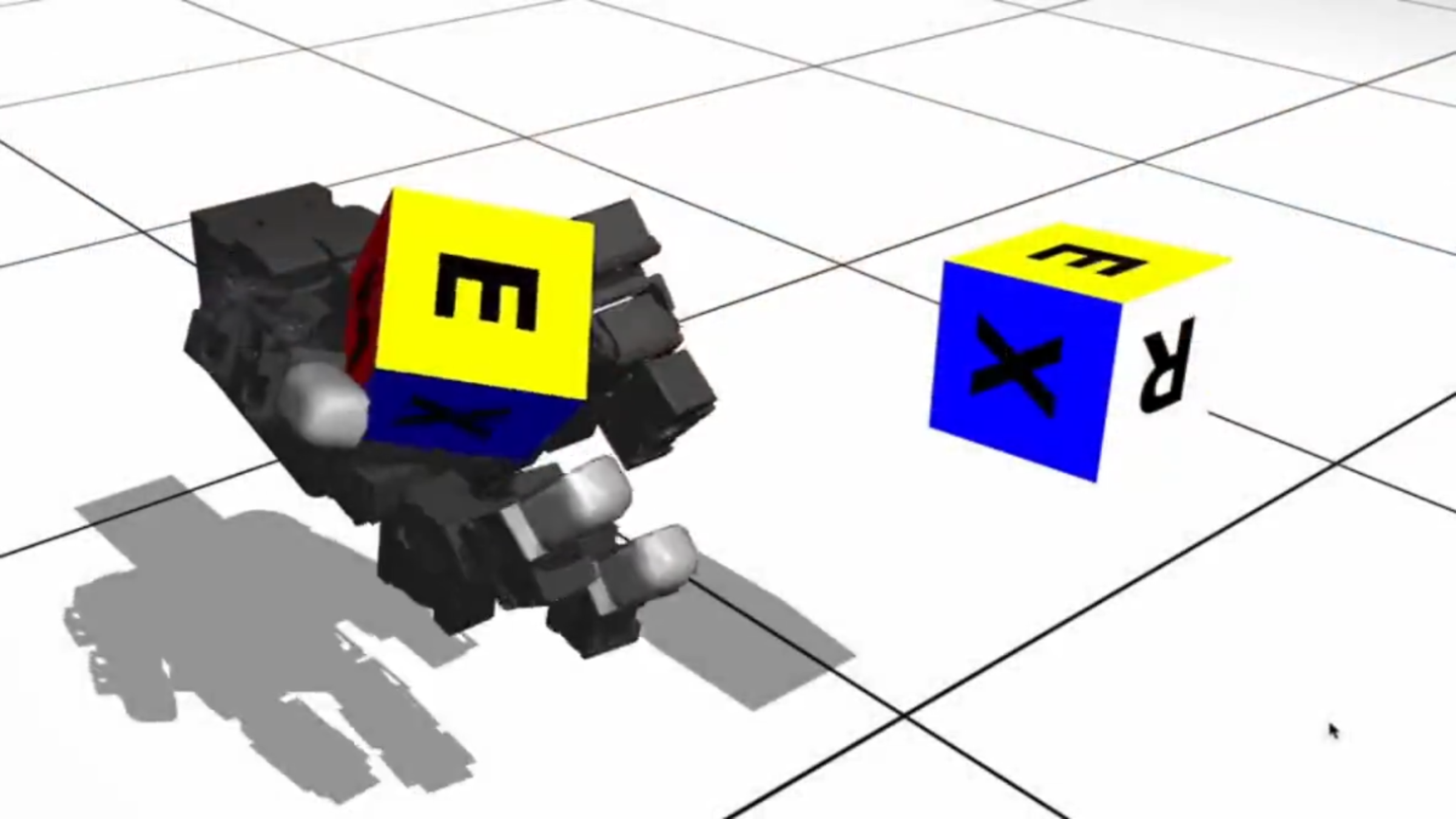
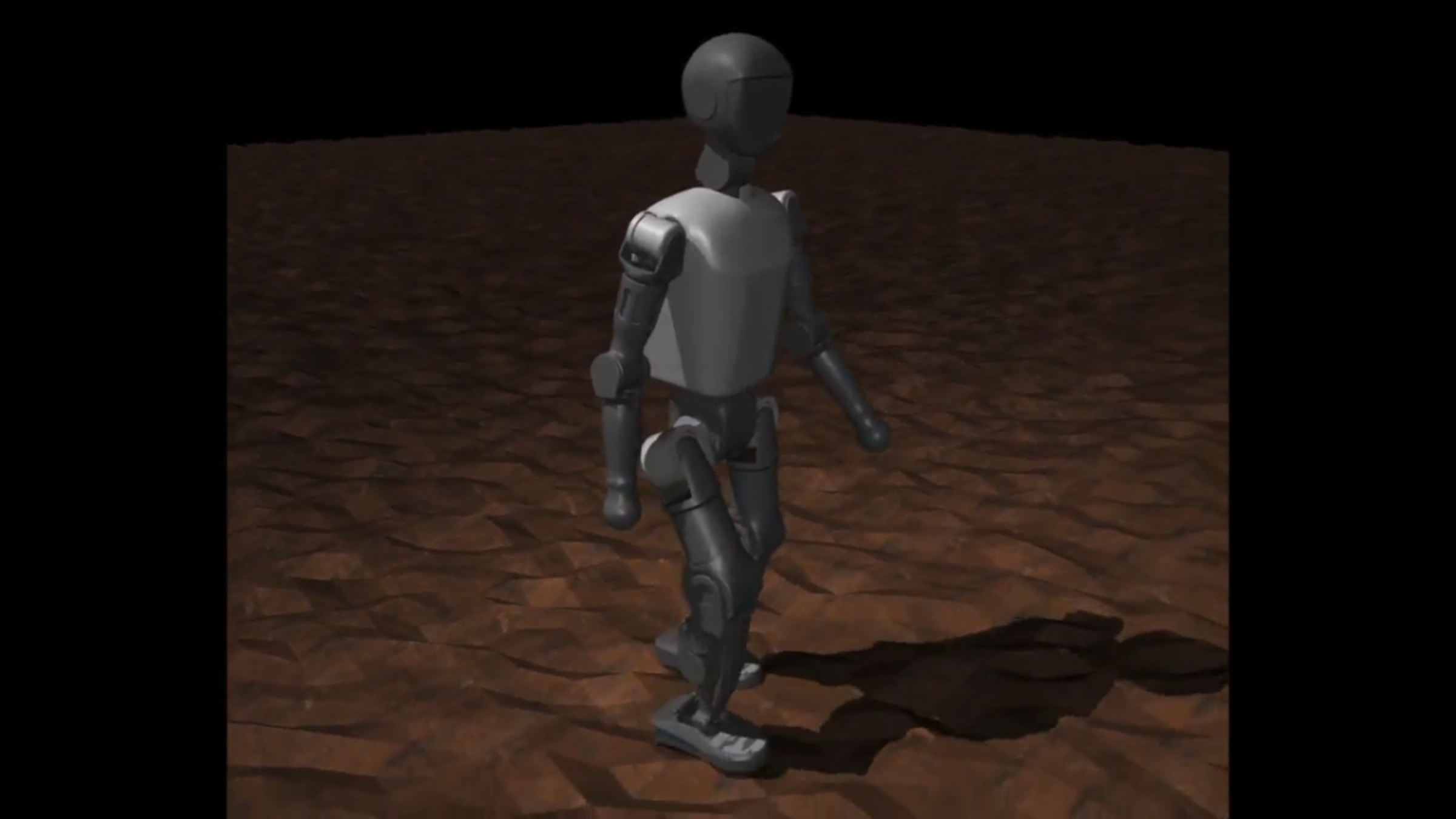
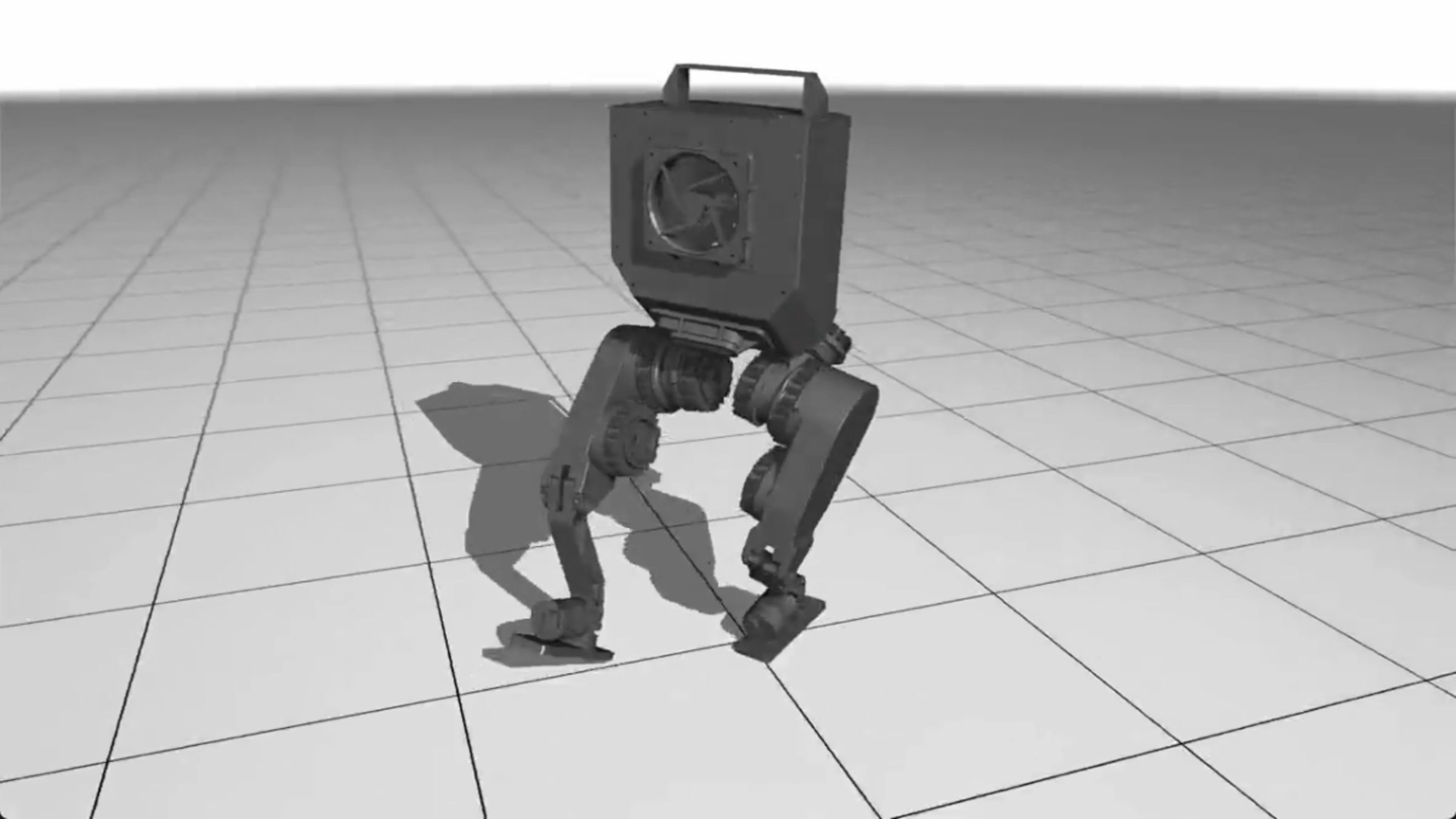
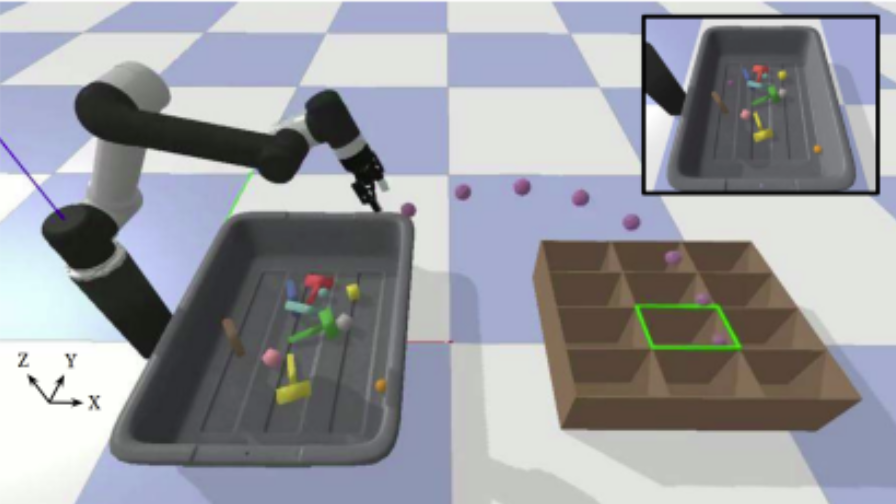
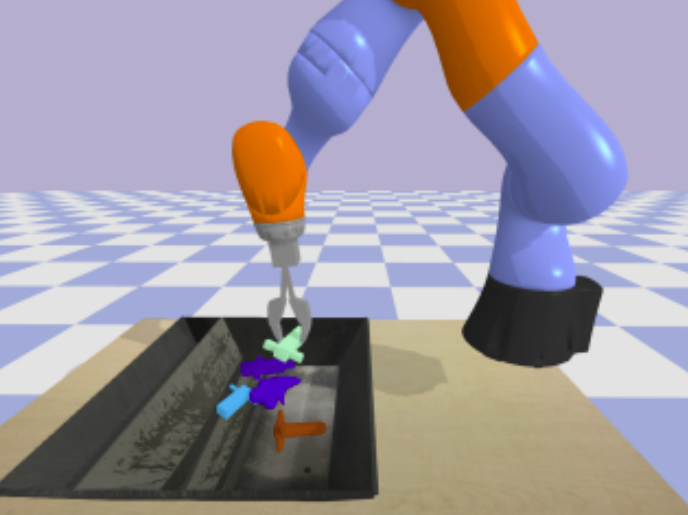
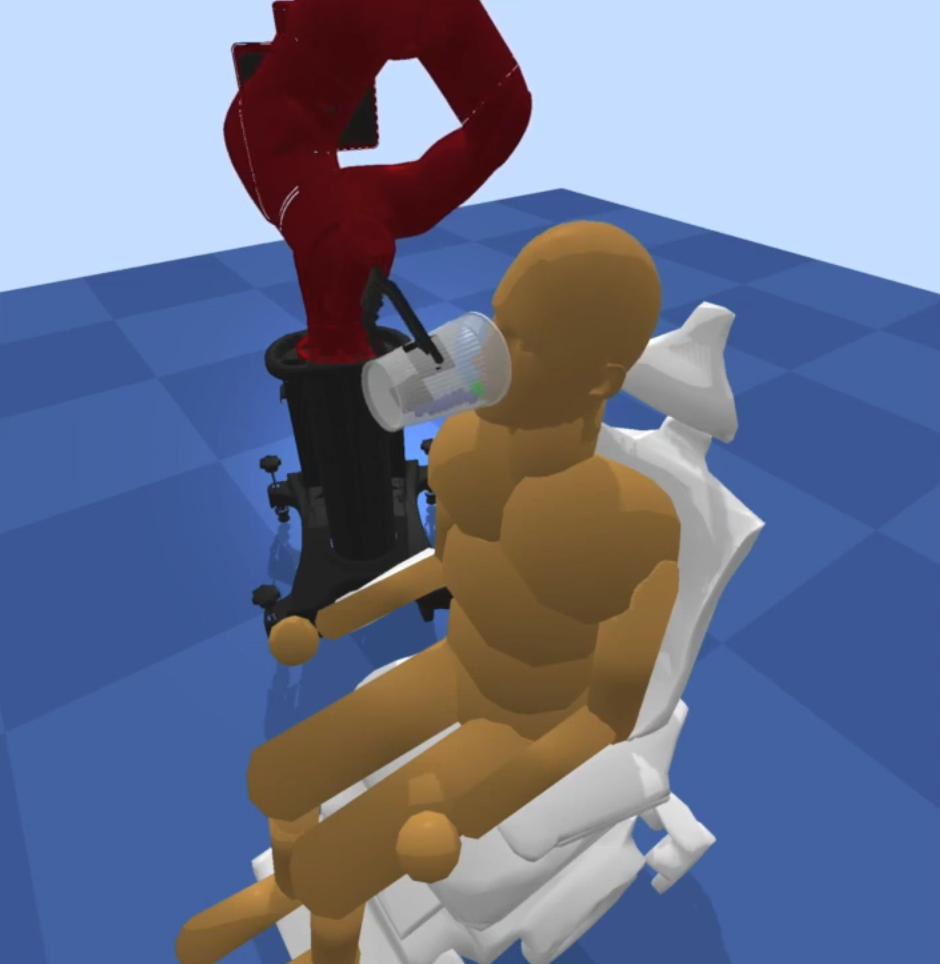
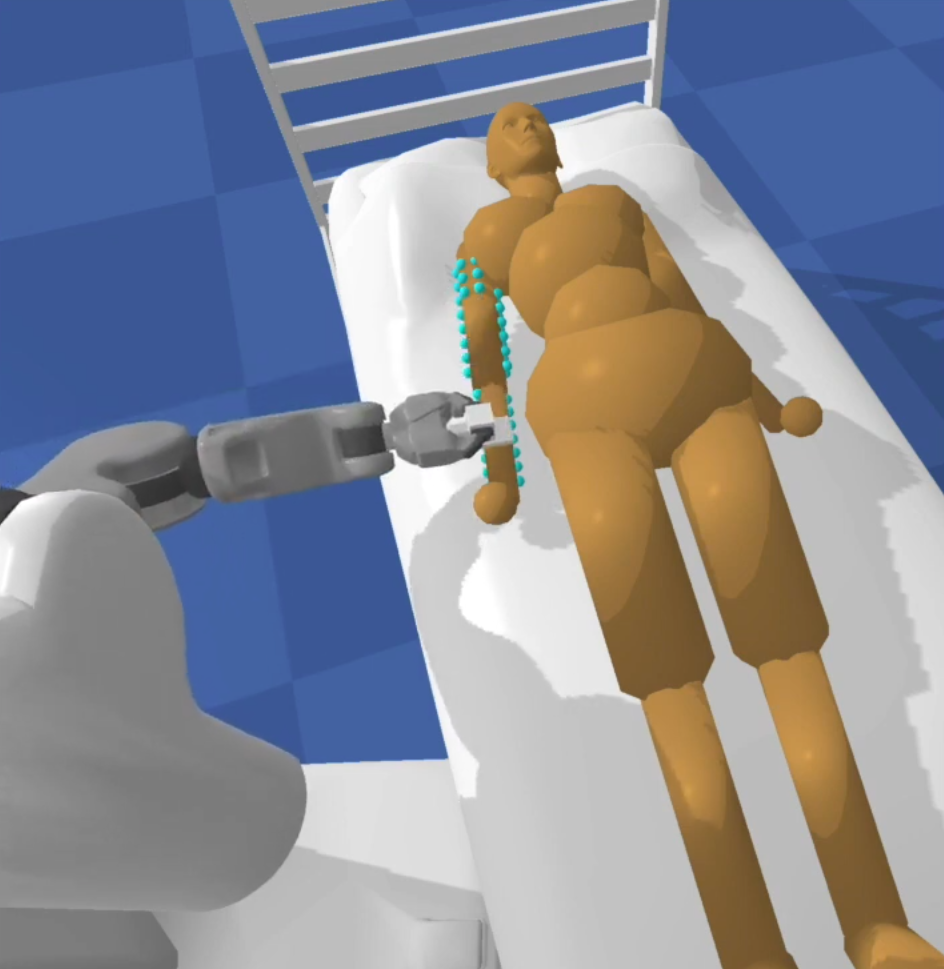
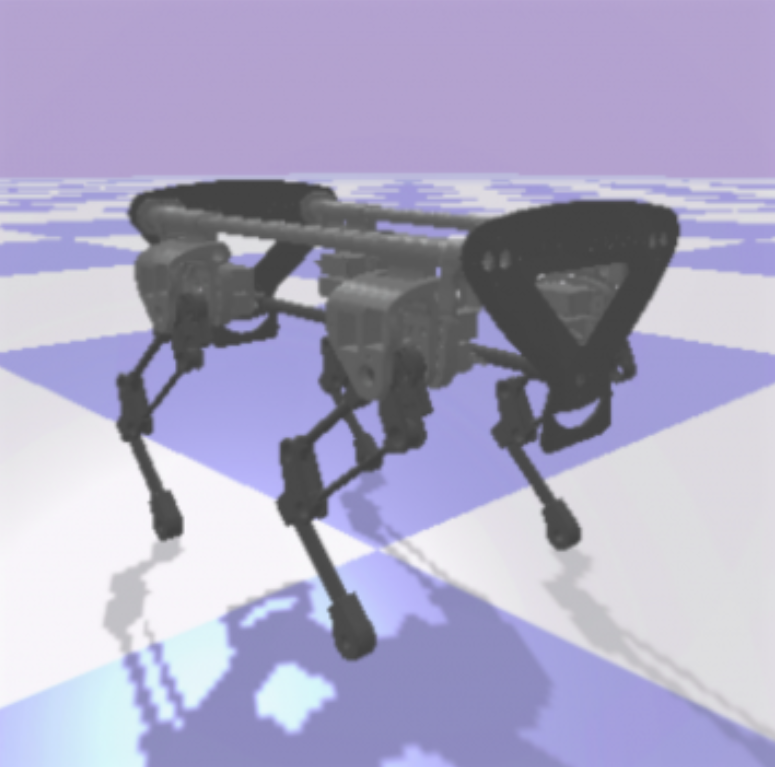
selection tailored to major robot learning domains: vision manipulation, locomotion, and navigation. (4)
We introduce an accompanying open, living repository to track updates in the field. By systematically
structuring the simulation landscape, we aim to lower the entry barrier for newcomers, reduce redundant
engineering for experts, and accelerate progress toward reproducible, general-purpose robot learning
systems.